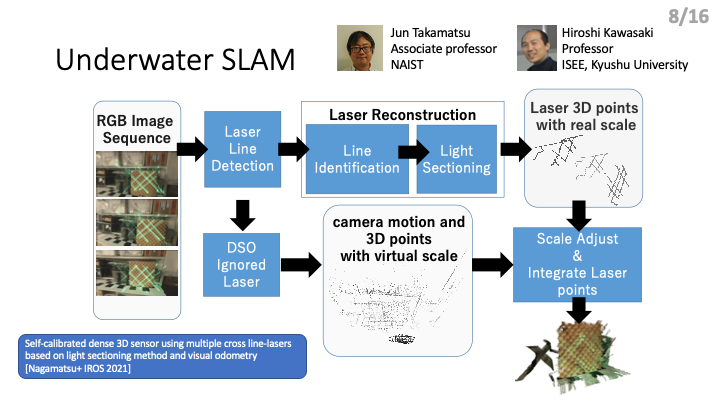
UNDERWATER SLAM
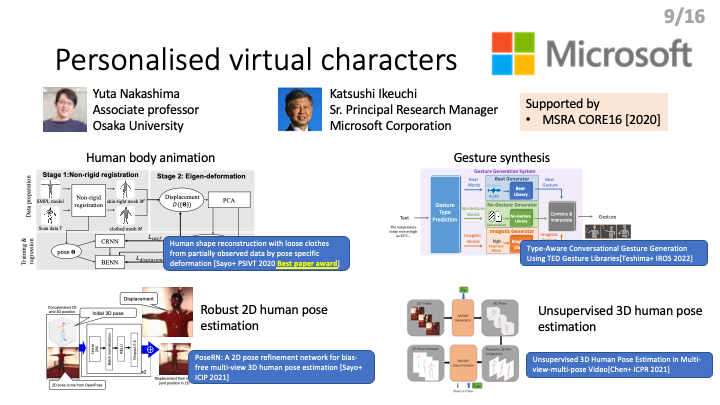
PERSONALIZED VIRTUAL CHARACTERS
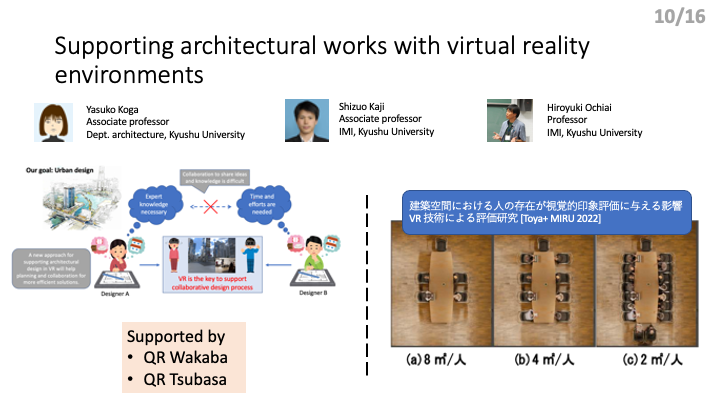
Supporting architectural works with virtual reality environments
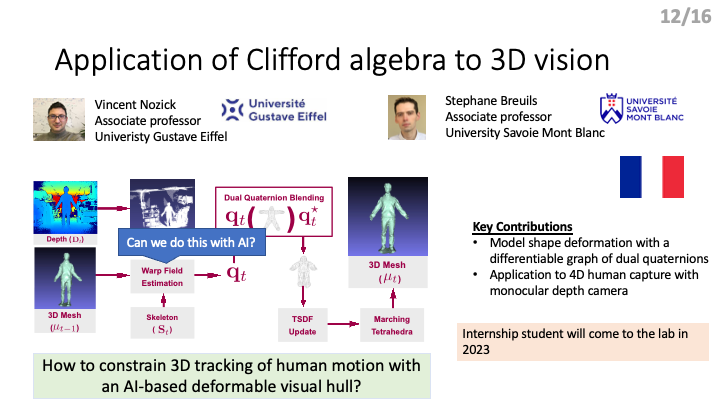
Application of Clifford algebra to 3D vision
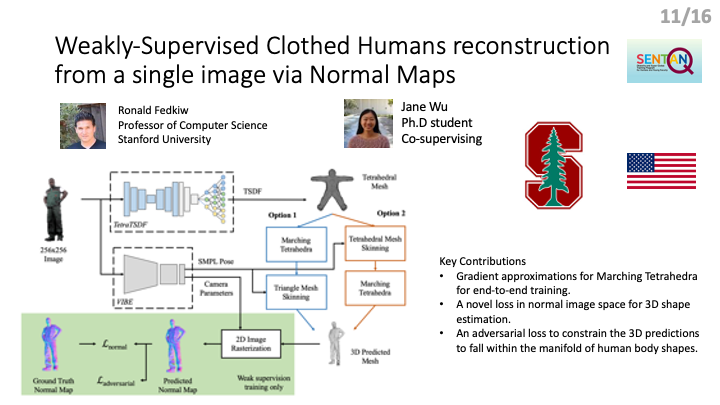
Weakly-Supervised Clothed Humans reconstruction from a single image via Normal Maps
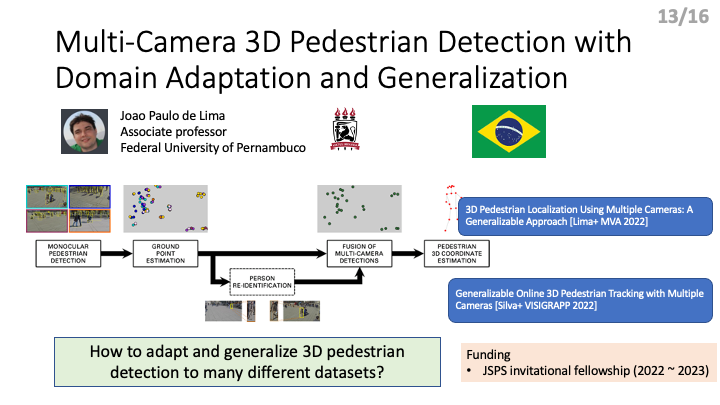
Multi-Camera 3D Pedestrian Detection with Domain Adaptation and Generalization
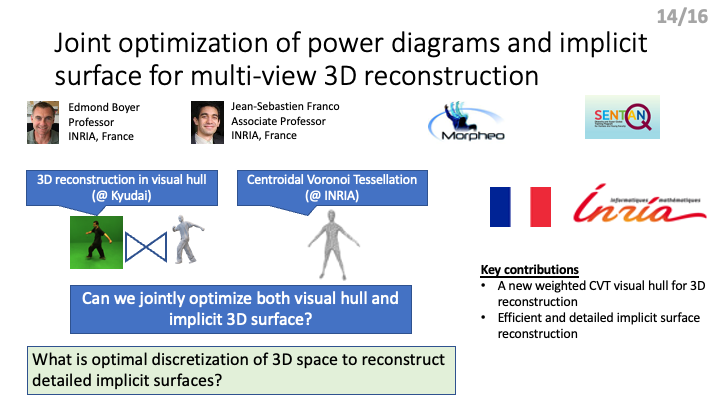
Joint optimization of power diagrams and implicit surface for multi-view 3D reconstruction
Drone-based 3D site analysis and simulation
The purpose of our research is to tackle these problems, both economic and technical, by offering a third alternative for site surveying with the use of a SLAM equipped drone that applies multiple depth cameras both expanding and strengthening the field that the drone could map, obtaining an accurate survey of a site, with the final goal of integrating FPV (first-person view) capabilities and MIXED REALITY applications to the drone making it possible to virtually project structures into the real world overlapping the live feed from the drone and visualize them using VR googles.